As smartphones become an essential part of daily life, user
demands for imaging capabilities continue to rise. Features like large sensors,
high-speed AF, and OIS are becoming increasingly common, greatly enhancing the
shooting experience. However, as imaging control systems grow more complex,
high power consumption has become a prominent issue. High power consumption not
only drains the battery faster, causing range anxiety, but also leads to
overheating when capturing high-resolution photos and 4K videos. This affects
in-hand comfort, triggers thermal throttling that interrupts shooting, and
disrupts the creative experience.
At the same time, the trend toward thinner and lighter
smartphones makes heat dissipation more difficult and costly, especially in
ultra-slim camera modules where heating is more pronounced. Therefore, optimizing
imaging actuation and reducing power consumption are not only fundamental
to ensuring battery life but also key to unlocking high-end imaging
performance. Awinic offers a new solution to address these challenges.
I. The Power Consumption Challenge in VCM Control Systems
From the perspective of motor structure and control schemes,
VCMs can be roughly divided into two categories: spring-leaf motors and
ball-bearing (including guide-rail) motors. Each has its own power consumption
challenges:
1. "Holding current" loss in spring-leaf motors
Spring-leaf VCMs rely on the balance between electromagnetic
force and spring tension to position the lens. When the lens reaches the target
position and needs to be "held," the system must continuously supply
a "holding current" to counteract the spring's restoring force. In
constant-current drive mode (the mainstream driver solution on the market),
traditional constant-current driver circuits operate at a fixed external supply
voltage. In this case, even if the load current (i.e., the holding current) is
small, the driver circuit itself incurs unnecessary power dissipation due to
the voltage drop across the constant-current control circuit. This loss
accumulates significantly over long holding periods.
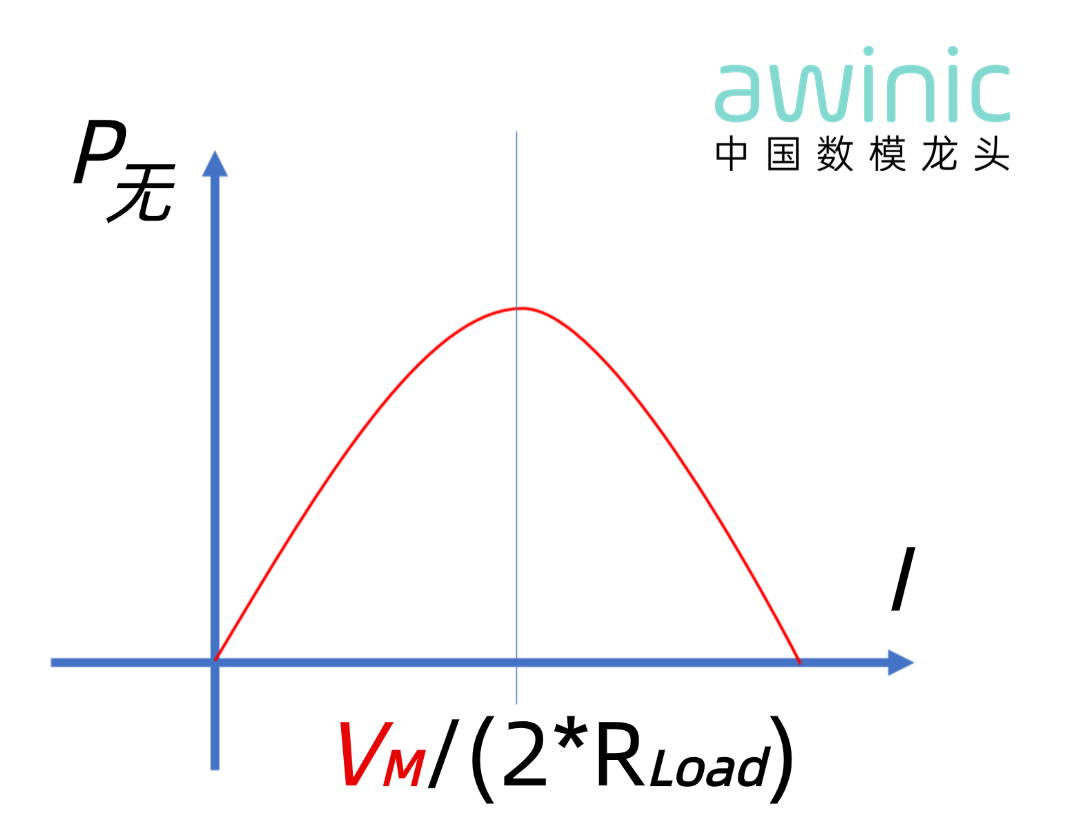
Figure 1: Absolutely wasted power P vs. holding current I
It can be seen that constant-current driving under a
constant-voltage circuit inevitably results in unnecessary power loss, and the
loss follows an inverted parabolic relationship with the holding current.
2. The "static friction" challenge in ball-bearing
motors
Ball-bearing motors use balls or bearing structures to suspend
the lens. These motors exhibit static friction when stationary. In practical
motion control, to overcome static friction and start lens movement, the system
needs to deliver a large current pulse instantaneously. However, once the lens
reaches the target position and enters the "holding" state,
theoretically no current is needed to maintain the position (due to friction or
other mechanical self-locking). But traditional control systems often cannot
finely distinguish between "start-up" and "holding" states,
or to maintain loop stability, they may keep a not-strictly-necessary current
level even in the holding state, ready to overcome static friction at any
moment. This seemingly small but persistent "holding current" also
generates losses in the driver circuit.
II. Awinic’s
Low-Power Solutions for VCM Applications
Awinic, deeply engaged in core smartphone component
technologies, has keenly identified the above industry pain points and, through
continuous innovation, has achieved significant breakthroughs in improving VCM
driver efficiency. Our solutions target these root causes:
1. Dynamic Voltage Scaling: Power on demand, precise energy
savings
To address the losses caused by holding current, especially in
constant-current control circuits for spring-leaf motors, Awinic pioneered a
dynamic voltage scaling solution: constant-current dynamic voltage scaling
technology (SmartDynaVolt).
This solution uses a predictive algorithm integrated into the
driver chip or working in coordination with an external AP/MCU to sense the
actual drive current required by the VCM in real time. Combined with a
high-efficiency voltage regulator chip (e.g., BUCK-BOOST), it dynamically
adjusts the supply voltage to the VCM driver circuit, achieving "power on
demand." When the load current decreases (e.g., in the holding state), the
system automatically lowers the supply voltage, significantly reducing the
voltage drop loss across the driver circuit.
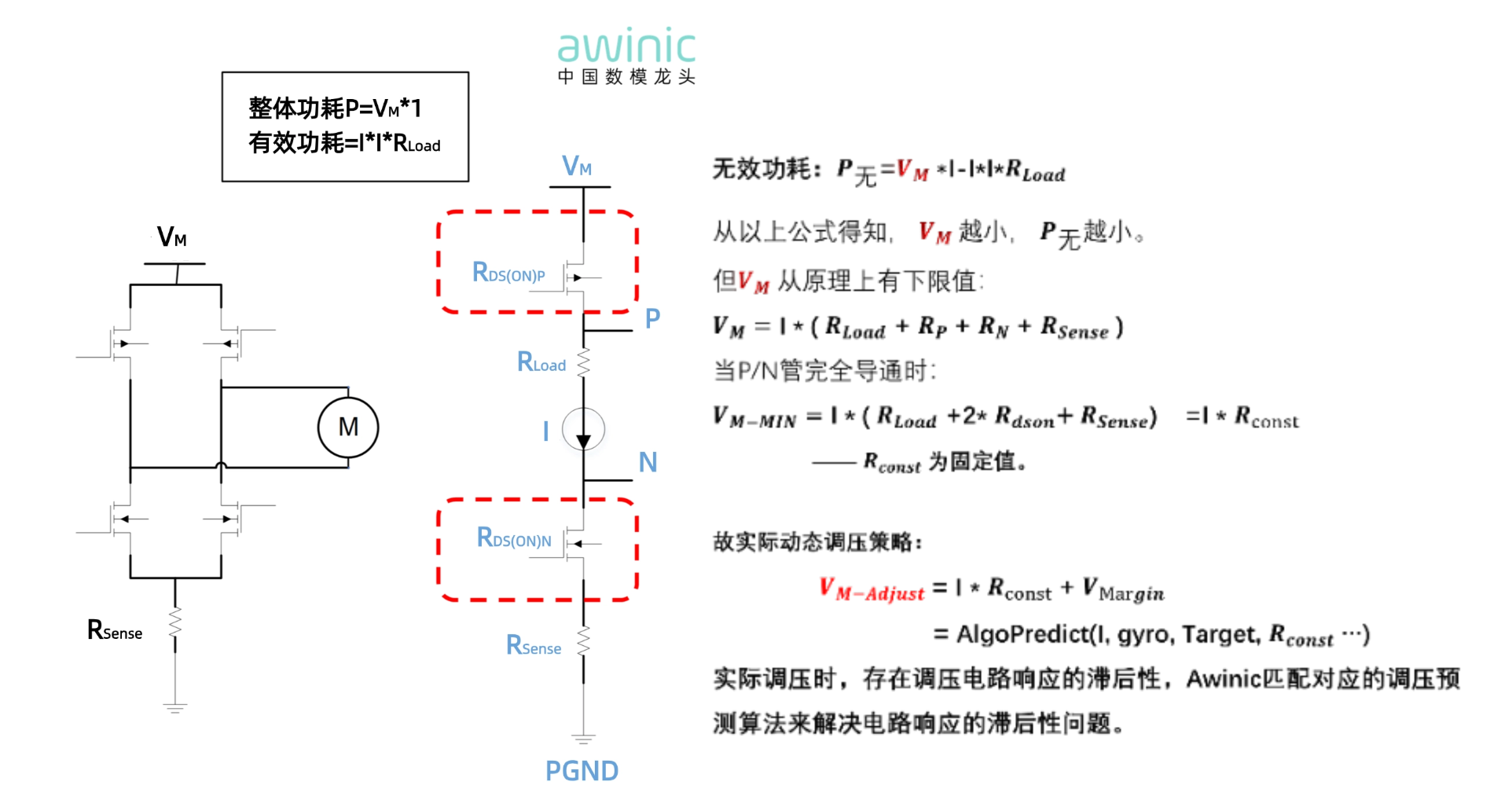
Figure 2: Constant-current driver circuit principle
Measured benefits:
Without compromising OIS performance (e.g., SR value), this
technology can save 30%–50% of power for the OIS subsystem in various
scenarios, greatly reducing energy consumption while maintaining stability. It
is particularly suitable for spring-leaf AF/OIS control systems that require a
continuous holding current.
Awinic VCM driver chips that support dynamic voltage scaling:
· AW86033ACSR: 2nd-gen
high-precision standalone OIS control chip, 1.8V–3.6V dynamic voltage range,
integrates Awinic's 2nd-gen closed-loop control algorithm.
· AW86066CSR, AW86068CSR: 2nd-gen
high-precision 2–3 axis integrated OIS control chips, 1.5V–3.6V dynamic voltage
range, support Awinic's latest algorithms and customer algorithm integration.
· AW86008CSR: High-precision
4-axis integrated OIS control chip, 1.8V–3.6V dynamic voltage range, supports
Awinic's latest algorithms and customer algorithm integration.
· AW86022CSR: 2nd-gen
high-precision closed-loop control chip, 1.7V–3.6V dynamic voltage range,
integrates Awinic's 2nd-gen closed-loop control algorithm.
· AW86026CSR: 2nd-gen
high-precision long-stroke closed-loop control chip, 1.7V–3.6V dynamic voltage
range, integrates Awinic's 2nd-gen+ closed-loop control algorithm.
· AW86026HCSR: 2nd-gen
high-precision long-stroke high-current closed-loop control chip, 1.7V–5.25V
dynamic voltage range, supports 300mA current gear, integrates Awinic's
2nd-gen+ closed-loop control algorithm.
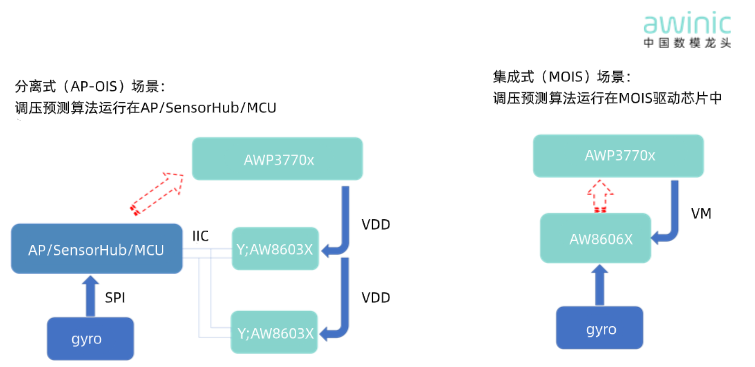
Figure 3: OIS dynamic voltage scaling system framework
To complement Awinic's dynamic voltage scaling solution, we have
also launched a dedicated DCDC chip, the AWP37702CSR:
·
Input voltage range: 2.2V–5.5V
·
Output voltage range: 1.4V–4.575V
·
Supports dynamic voltage scaling control (slew rates: 2V/ms,
5V/ms, 10V/ms, 20V/ms)
·
Auto PFM mode and forced PWM mode
·
Max continuous output current: 800mA–1.5A (depending on
operating conditions)
·
Package: WLCSP 1.3mm x 1.3mm-9B
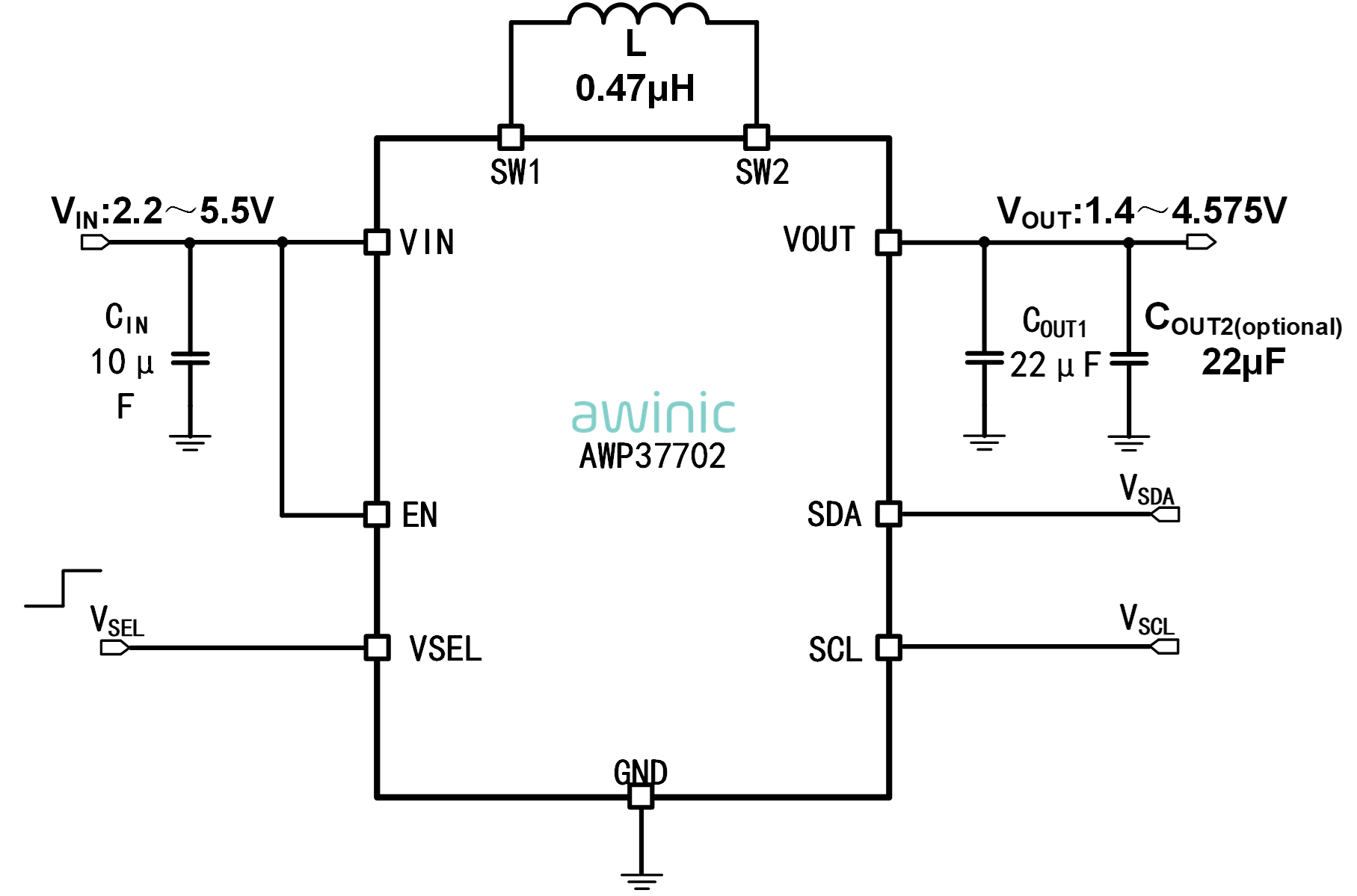
Figure 4: AWP37702CSR
Typical Application Schematic
Smart Algorithm: Scenario optimization, deep sleep (especially
for holding state of ball-bearing motors)
Pain point in specific scenarios:
For ball-bearing motor applications, where holding current is
maintained unnecessarily to counteract static friction, Awinsic developed
the SmartHolding algorithm.
This innovative algorithm uses a novel control loop mechanism to significantly
reduce unnecessary drive current meant to overcome static friction, thereby
greatly lowering power consumption.
Measured benefits:
Test data shows that with the SmartHolding algorithm, the
holding state current of ball-bearing motors can be drastically reduced,
achieving a near "deep sleep" ultra-low power state. This directly
solves the holding current waste problem caused by concerns over static
friction in ball-bearing motors.
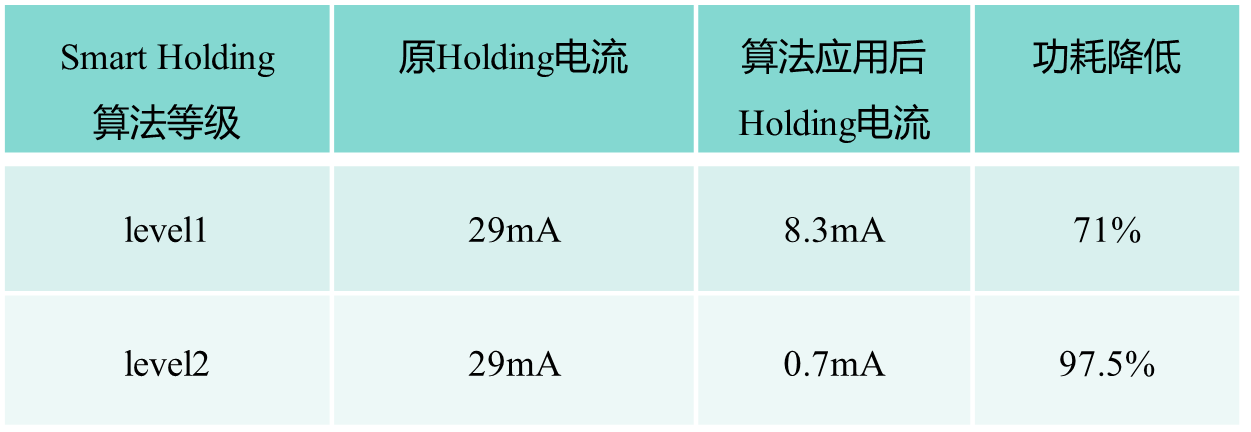
Table 1: Measured results of SmartHolding algorithm
Awinic VCM control chips that support both dynamic voltage
scaling and the SmartHolding algorithm include: AW86066CSR,
AW86068CSR, AW86008CSR, AW86022CSR, AW86026CSR, AW86026HCSR, and others.
III. Awinic’s Long-Term Exploration of Low-Power VCM Solutions
Looking
ahead, Awinic will continue to explore better solutions for low-power VCM
control technology: optimizing motor control performance while minimizing power
consumption. In addition to the dynamic voltage scaling and smart algorithms
described in this article, Awinic will continue to invest in and productize PWM
control and advanced process technologies to reduce baseline current, providing
the industry with more low-power VCM control solutions.






