
A:根据使用说明文档,AW86020解锁时必须先处于standby状态(0x00写0x88),当处于active状态时单独解锁了0x5A寄存器,会把0x2E,0x2F,0x30锁给锁上,因此需要注意AW86020解锁时的工作状态。
A:AF数据是10bit的,其中0x0009寄存器为高2bit,0x000A寄存器为低8bit。写入AF数据有两种方式,向0x0009寄存器连写两个字节或先写0x000A寄存器,再写0x0009寄存器,写入0x0009寄存器触发AF数据生效。因此如果分开写AF code时,应该先写0x000A寄存器,再写0x0009寄存器。
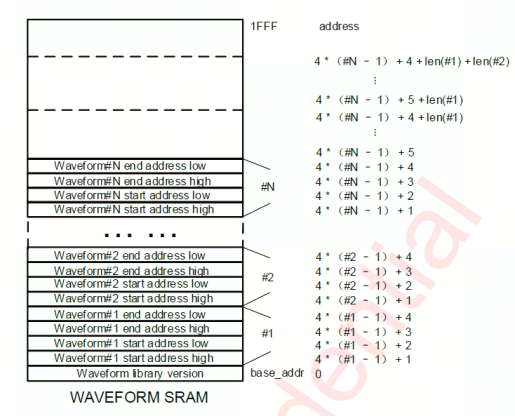
A:Haptic波形文件参数一般由三部分组成:版本号(固定1byte)、波形头地址信息(两字节起始地址、两字节结束地址)、波形数据,详细见芯片的规格书,如下图以AW86938举例:
下图是一个波形文件,应该如何解析从而判断波形文件正常?
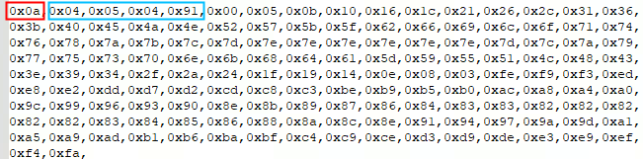
红框表示波形版本号,固定占1字节;蓝框表示波形的起始地址和结束地址,起始地址高位为0x04,表示起始地址是从0x0400开始,低位为0x05,表示头文件信息占5字节(版本号、波形地址);(0x0491-0x0405)+1=141,结束地址减去起始地址可以计算出波形data大小为141字节。
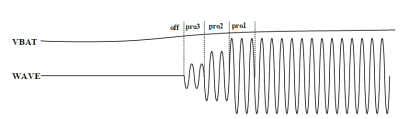
A:为了避免电池低电量时马达抽大电流导致VBAT跌落整机异常关机,AW8693X系列新增VBAT_PRO功能。在震动过程中每当芯片检测到电池电压低于设定阈值时,AW8693X将立即降低输出增益;每当检测到电池电压高于当前档位设定阈值时,输出增益将在波形过零点恢复到上一档增益。
VBAT_PRO功能共可降低4档增益,Boost模式下每档降低为当前档位增益的75%,Bypass模式下每档降低50%;
如增益连续降低三档增益后电池电压仍低于第三档设定阈值,则会关闭波形输出,如下图:

电池电压每恢复一档,则在波形输出过零点位置恢复为上一档增益,如下图:
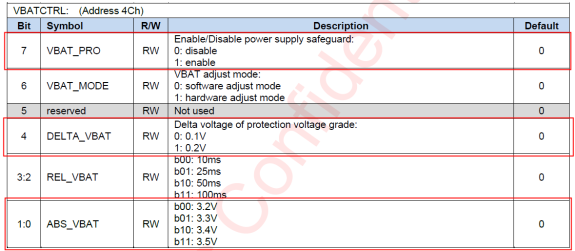
VBAT_PRO功能使能由0x4C bit7配置;第一档触发电压由0x4C bit1:0配置,3.2V~3.5V可配;每档电压步进由
0x4C bit4配置,即在第一档触发电压基础上每0.1V或0.2V为一档,具体如下:
A:线性马达驱动芯片的瞬时功耗与负载阻抗和输出波形幅度均相关,简单举例:相同马达驱动芯片以相同输出波形驱动阻抗不同的马达时,功耗不同;以不同的驱动波形驱动相同的马达,功耗也不同。由于不存在固定的使用条件,datasheet无法给出确切的功耗数据。
由于短震波形时长一般为十几到几十毫秒,为瞬发功耗;如需评估线性马达平均功耗,建议以马达长震场景进行估算,以下为举例:
假设马达额定电压即芯片输出给马达的电压Uout=1.2Vrms,马达直流阻为8ohm,则输出功率:
Pout=Uout^2/Rload=0.18W
Haptic芯片效率典型值取80%,则电源端输入功率:
Pin=Pout/80%=0.225W
如电源电压Vin=4V,则输入端平均电流:
Iin=Pin/Vin=56.25mA
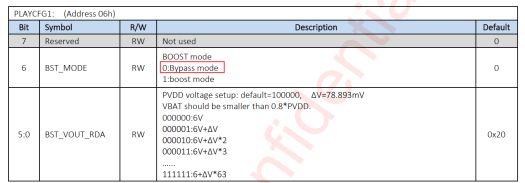
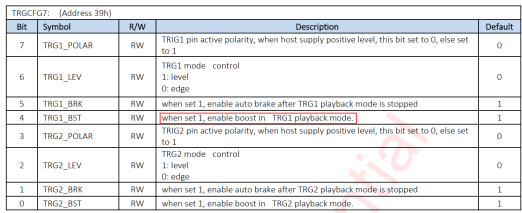
说明:如上图所示,boost设置有两个位置,其中BST_MODE作用于RAM/CONT/RTP/I2S播放模式下;
TRGx_BST作用于Onewire与Trig mode下。
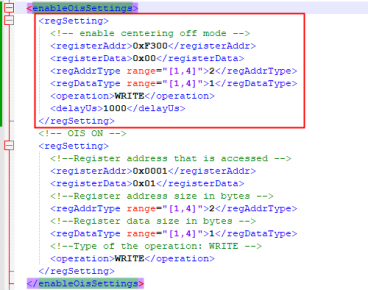
客户反馈ois on后可以获取gyro数据,但整机上确认无防抖效果

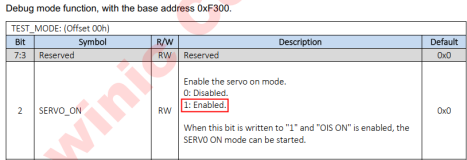
进一步确认F300寄存器状态,此时处于servo on 状态

解决方案:ois on之前servo on off,xml配置供参考
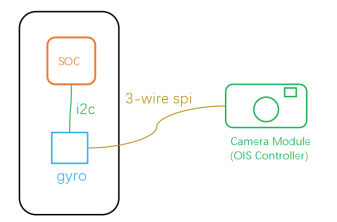
需要整机对ICM45631开启AUX 3线spi功能,aw86006才能识别
r 0x71 1字节 //获取 who am i 是否是0x09
w 0x2c 0x20 //选择主接口配置功能
w 0x2e 0x00 //配置AUX接口为3线spi
r 0x2e 1字节 //回读是否写成功
w 0x30 0x13 //使能AUX接口
r 0x30 1字节 //回读是否写成功
w 0x54 0x03 //使能gyro和accl
w 0x55 0x24 //配置gyro odr为250,accl为2g
w 0x2c 0x00 //关闭主接口配置功能a
A:AW862xx最大供电电压为5.5V,支持最小负载阻抗为5Ω,所以最大输出电流Imax = 5.5 / (5 + Rdson)。
具体型号对应的最大输出电流如下表所示:
AW862xx系列芯片最大输出电流对应表
1.先确保芯片三路供电IOVDD AVDD VMVDD供电正常(一般开启相机切换到主摄或长焦)
2.确保芯片固件算法能够正常启动,读到稳定运行标志(standby_flag:1)
确认方法:举例异步设备地址0x61[7bit] r 0xff11 1byte,看是否为1.
3.基于1&2条件下在进行AF功能配置(通过同步i2c地址配置,以下举例0x69[7bit])
0x69 w ff1f 0xae //解锁 0x69 w ff11 0x02 //active mode 0x69 w 0x0009~0x000a //写入target 0x0009:bit9~8, 0x000a:bit7~bit0
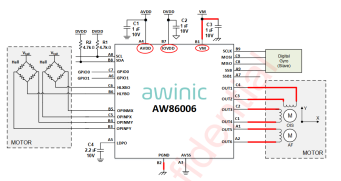
A:
1、固定放电模式:
①固定放电模式有D1,D0两个引脚控制,总共9种模式。
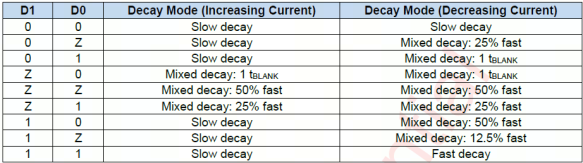
②slow放电纹波小,但是无法抑制反向电动势,在转速较快时,Sine波形会失真;Fast放电模式能够抑制反向电动势,但是会增大纹波。
2、自适应放电算法(推荐):
①ADECAY为自适应放电模式选择引脚,高电平有效,低电平时放电模式由D0,D1控制, ADECAY引脚必须要在NSLEEP为低电平时设置。
②自动检测电流,电流符合预期Sine波形时,用slow放电;波形失真时,用Fast放电迅速将电流校准回来。兼顾电流纹波与反向电动势
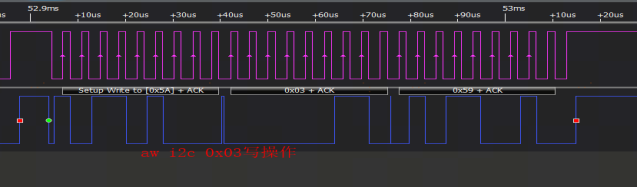
一些客户在mcu系统上编码时,反馈i2c读chip_id操作正常,写操作也无异常日志打印。
1.某客户对i2c设备地址0x5a ,0x03寄存器写入0x59数据异常操作。
【i2c设备地址写操作+寄存器地址+i2c设备地址写操作+数据】,不符合i2c写规范,无实际有效数据写入到寄存器
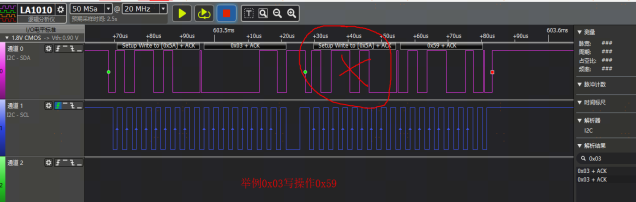
2.艾为测试正常写时序【i2c设备地址写操作+寄存器地址+数据】
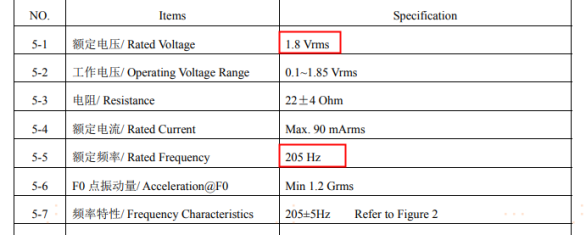
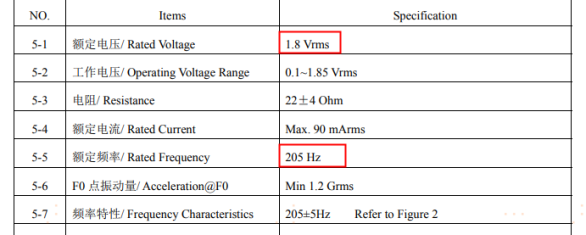
1.新马达规格书说明
变更马达后,代码中应修改以下两个参数:额定电压(Rated Voltage)、额定频率(Rated Frequency)。以某电机为例,额定电压为1.8 Vrms,额定频率为205Hz。
2.代码配置
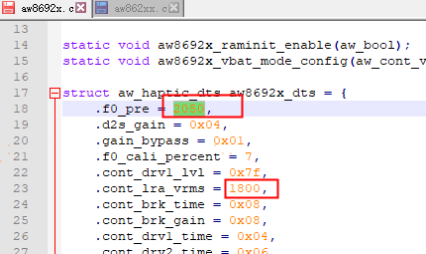
以aw8692x为例,打开aw8692x.c文件,需修改以下两处参数:
(1)修改f0_pre的参数为2050,f0_pre = Rated Frequency * 10。
(2)修改cont_lra_vrms参数为1800,cont_lra_vrms = Rated Voltage * 1000。
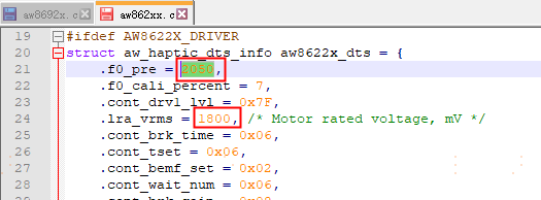
以aw862xx为例,打开haptic_nv.dtsi文件,需修改以下两处参数:
(1)修改f0_pre的参数为2050, f0_pre = Rated Frequency * 10。
(2)修改lra_vrms参数为1800, lra_vrms = Rated Voltage * 1000。
1.新马达规格书说明
变更马达后,代码中应修改以下两个参数:额定电压(Rated Voltage)、额定频率(Rated Frequency)。以某电机为例,额定电压为1.8 Vrms,额定频率为205Hz。
2.代码配置
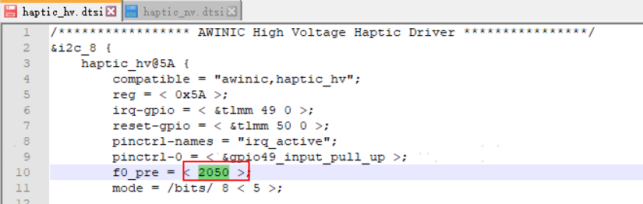
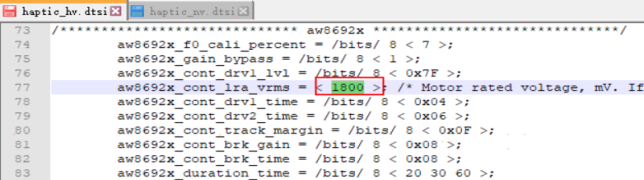
以aw8692x为例,打开haptic_hv.dtsi文件,需修改以下两处参数:
(1)修改f0_pre的参数为2050,f0_pre = Rated Frequency * 10。
(2)修改aw8692x_cont_lra_vrms参数为1800, aw8692x_cont_lra_vrms = Rated Voltage * 1000。
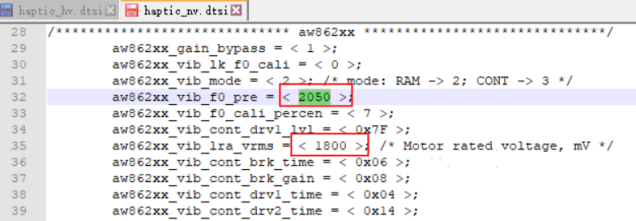
以aw862xx为例,打开haptic_nv.dtsi文件,需修改以下两处参数:
(1)修改aw862xx_vib_f0_pre的参数为2050,aw862xx_vib_f0_pre = Rated Frequency * 10。
(2)修改aw862xx_vib_lra_vrms参数为1800, aw862xx_vib_lra_vrms = Rated Voltage * 1000。
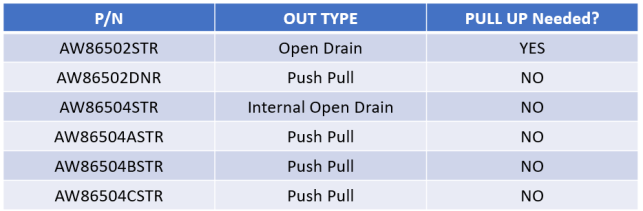
A:视每个型号的 OUTPUT 脚位的架构。艾为有3种架构,介绍如下。
1. Open Drain 架构需外接100KΩ上拉。
2. Push-Pull 架构不需要外接电阻上拉。
3. 内部 Open Drain 架构已上拉,不需要外接电阻上拉。
以下是艾为3种 OUTPUT PIN 架构图以及参考设计。
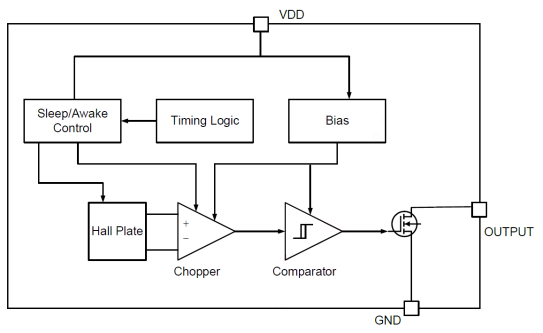
Open Drain架构
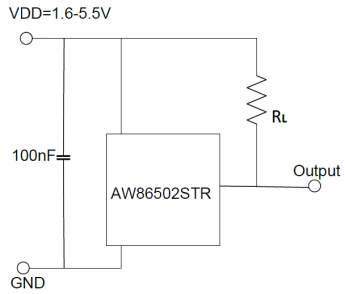
Open Drain架构的参考设计,需接上拉电阻
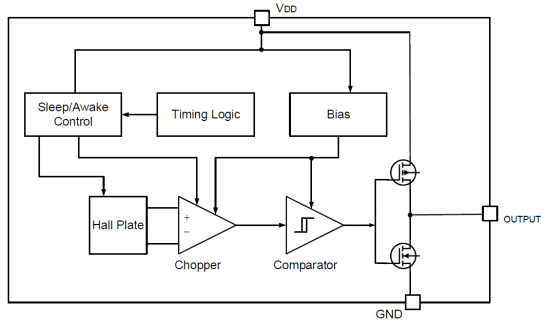
Push Pull架构
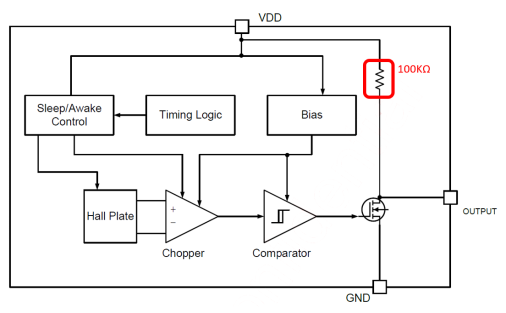
内部Open Drain架构,内部已有上拉
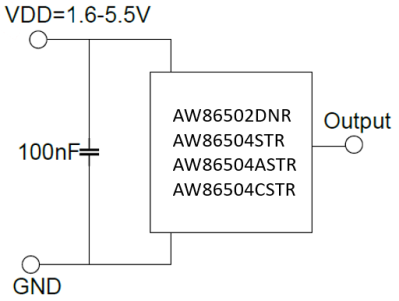
Push Pull架构的参考设计,不需接上拉电阻
以下表格供快速参考




沪ICP备10011954号 |

沪公网安备 31011202011955号
 中文
中文